Percobaan
7
Led
RGB, Buzzer, Soil Moisture, & Push Button
1. Prosedur [Kembali]
- Rangkai semua komponen
- Buat program di STM32 CubeIDE
- Jalankan program dan cobakan sesuai kondisi
Hardware :
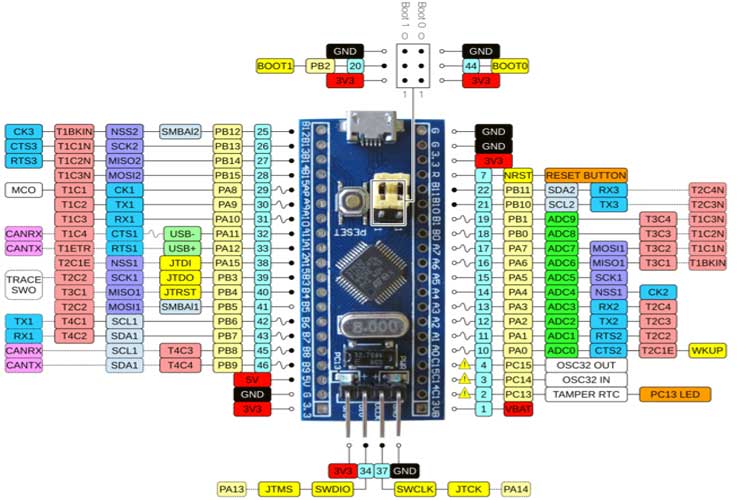
STM32
Buzzer

Soil Moisture Sensor

Resistor
.jpg)
Push Button

LED RGB
Diagram Blok
- Rangkaian

- Prinsip Kerja
- Flowchart

- Listing Program


Tidak ada komentar:
Posting Komentar